Platforms monitoring tools
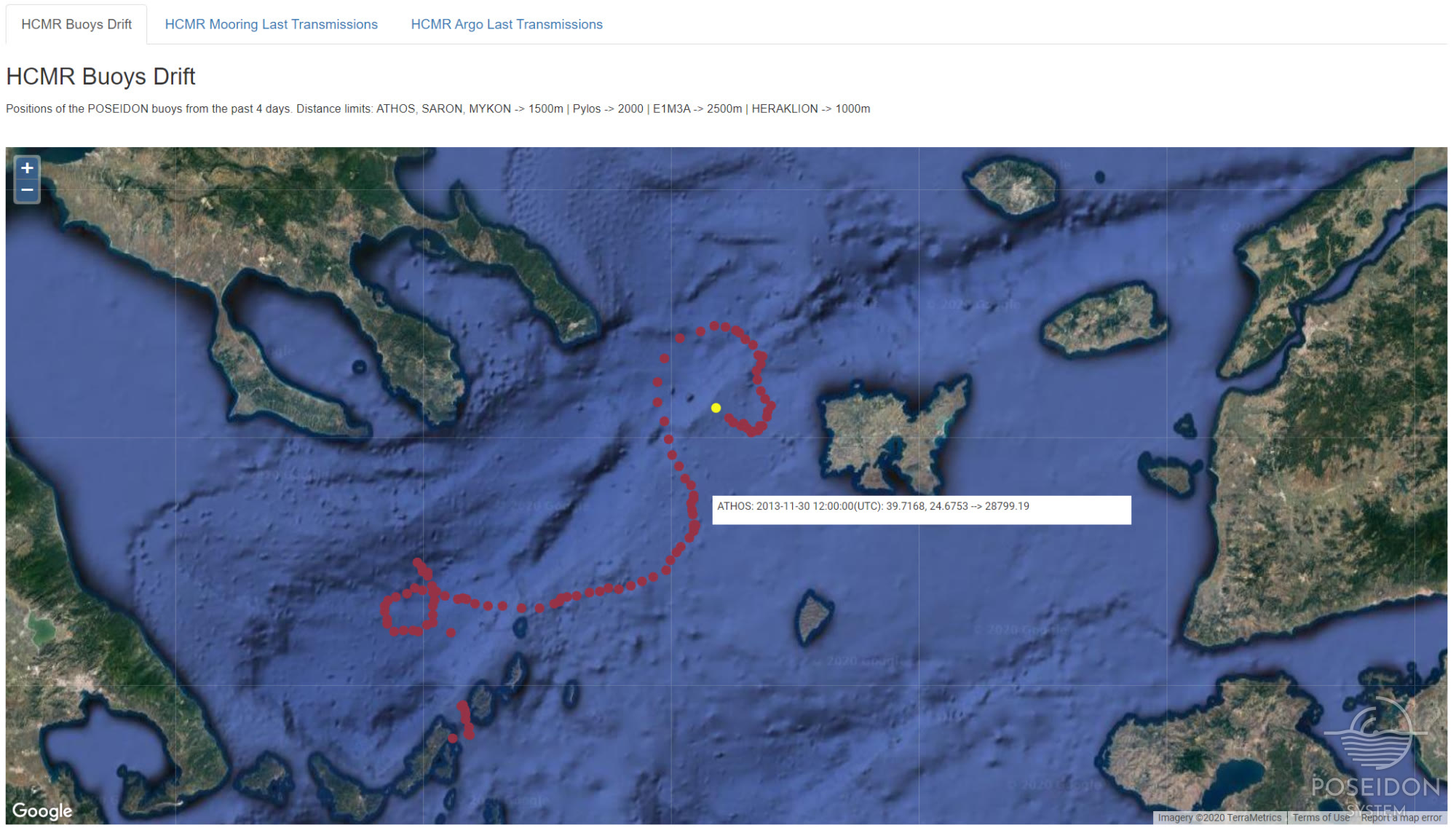
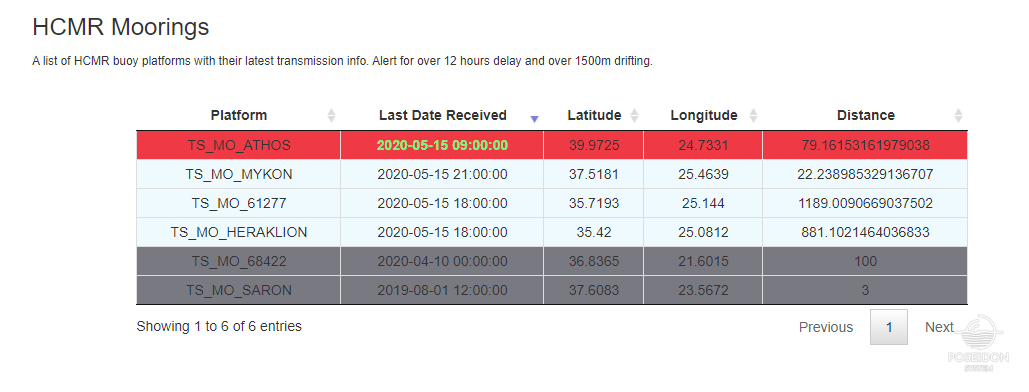
Deploying and operating autonomous marine platforms raise constant concerns in the responsible scientific and technical teams for their safety and operational status. Thus, a web based alerting service has been developed by the POSEIDON’s IT team which provides combined information regarding the positioning and the communication status of the moored buoys and the Argo profilers. The implemented service, provides a visualization of the fixed platforms position during the recent period along with a drift calculation from the location of the initial deployment. In another instance, an array of the latest metrics is provided, which contains the latest transmission date together with the relevant position and the drifting from the initial deployment location. An additional instance is also available for the Argo profilers, consists of the latest profiler’s transmission date and position together with the maximum recorded depth reported by the profiler. The following metrics are regularly checked with automated procedures and an alert is raised whenever they exceed a predefined threshold:
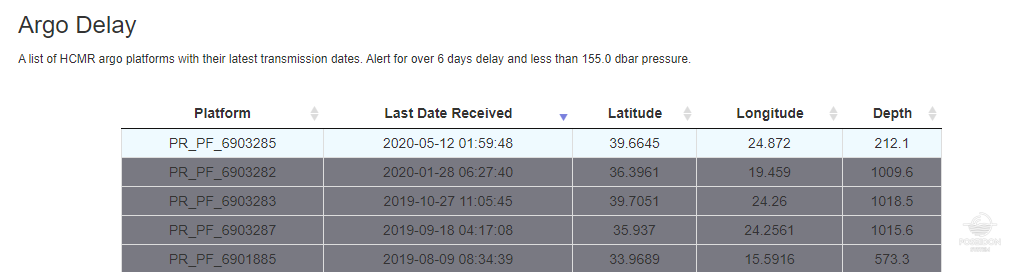
- The latency of the transmitted measurements which is dependent on the type of the platform. Anything greater than the expected latency may imply an issue to the platform, to the communication system or to the hosted sensors.
- The drifting of a fixed mooring compared to the initial position of deployment. This metric may indicate a serious threat to the station’s safety, such as a detaching of its anchoring system. Actions need to be taken as fast as possible in such cases to avoid any further damages to the station and its carrying instruments as well as to prevent any maritime accidents.
- The maximum depth of recording. This metric applies only to the Argo profilers, and while this metric is too small, it possibly indicates that the profiler may have shifted close to the coast and an imminent stop of transmission has to be expected. Based on the last transmitted geographical location, the POSEIDON team decides if a recovery of the profiler is possible.
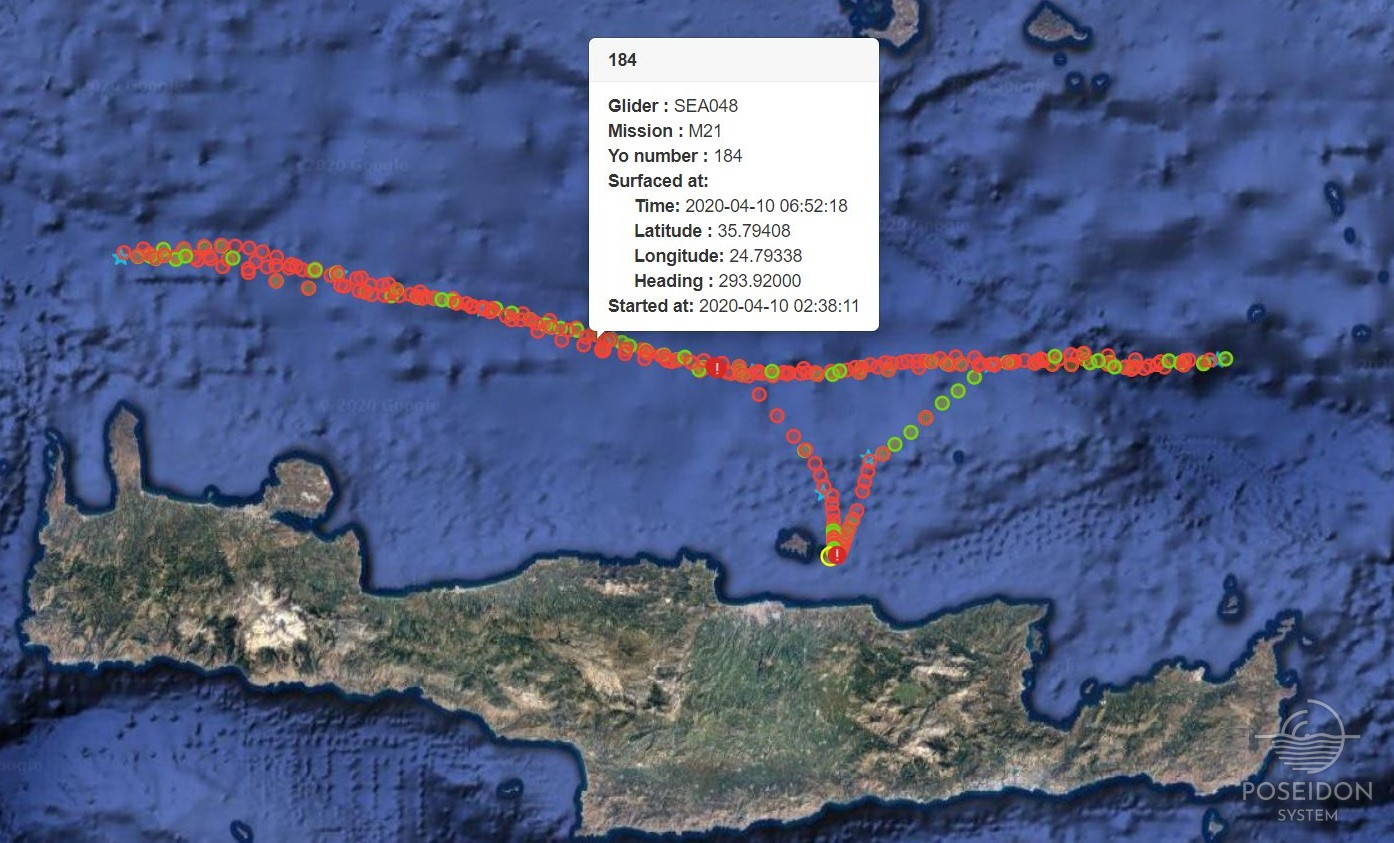
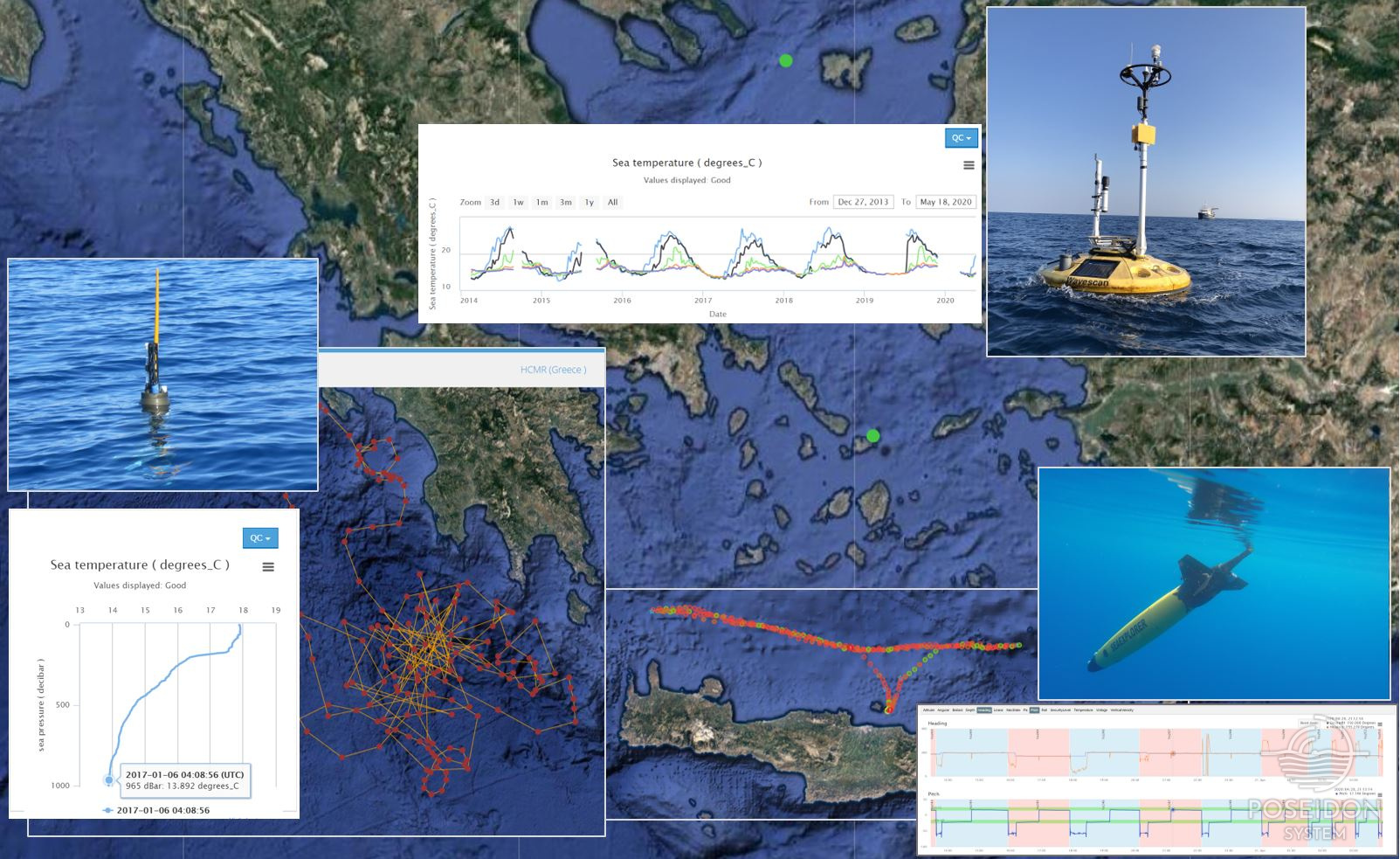
Since 2015, POSEIDON system joined the ocean glider community through the acquisition of two SeaExplorer gliders, which are autonomous underwater vehicles that can be controlled and piloted remotely. Through satellite communication, the pilot can download data, check the functionality of the vehicle and its sensors, tune some of its operation settings, correct or redefine its trajectory and handle any emergency situations. Apart from the communication software that allows the interaction of the pilot with the glider, an additional, dedicated inspection tool has been developed. The trajectory of the glider’s mission is provided on a map along with the instant display of the most important communication metadata, while all the transmitted navigation and scientific information are available for visualization by the pilots. The plots can provide additional information such as minimum and maximum boundaries, safety bands of operation, combinations of data series and derived parameters, that should be calculated by the direct measurements received by glider, such as the salinity and the dissolved oxygen.